Hi, First of all thank you for this software. It is so intuitive and easy to use.
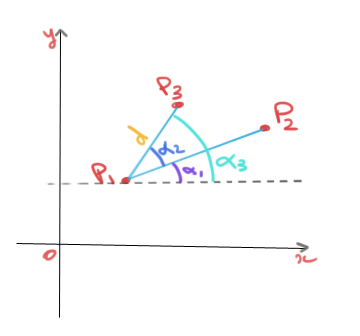
I am seeing if this software will work for my study. I am trying to track an objects position relative to a 2D plane. I would like to track its position (X,Y) but also the angle or direction the object is facing. The camera will not be directly above the plane either, so I am using a perspective grid to calibrate.
I have attached some images of a mockup I am experimenting with. I have marked the images in red so you can see the kind of measurment I need.
There could be a way of calculating it using the relative position of the 2 points in excel, but I would rather skip that step If I can.