It is not currently possible.
I think the way to go with this would be to have a VLC backend as capture source and leverage all the streams that VLC supports.
796 2016-11-18 12:04:55
Re: RTSP stream (4 replies, posted in Ideas and feature requests)
797 2016-11-18 11:57:44
Re: 1 camera, 2 capture screens (2 different delays) (5 replies, posted in Bug reports)
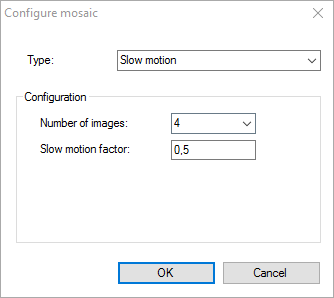
There is slow motion on a live feed indeed. It was actually the challenge that sparkled the development of this multi-view feature. In the mosaic configuration dialog the third option is Slow motion.
Obviously continuous slow motion is not sustainable per se, if you are at 0.5x speed for example, during the time you are watching the slowed down feed, twice as much data needs to be cached for later display. This can't be going on forever. The way it works is using the multiple views, each view starts at a different point in time and slowly drifts, until it jumps back to live and start drifting again. Any given action should be displayed in slow motion somewhere in one the sub-feed or maybe start in one and end in another.
Yeah record/replay scenarios would be very interesting. I'm starting to think that the way to keep it completely open to the myriad of use-cases would be to make it fully "programmable", and have a bunch of standard scripts built-in for ease of use. Then for niche use-cases people can write their own script or have someone write it for them.
798 2016-11-17 21:24:41
Re: 1 camera, 2 capture screens (2 different delays) (5 replies, posted in Bug reports)
Great. That's the type of feedback I was looking for for this feature. I put it in as an experiment with default settings but not really knowing the level of configurability that would be useful for all the use cases.
I'm not sure the other modes are that useful after all, even the slow motion one. If anyone has tried them please write up.
If not it might be better in terms of usability to focus on the multiple delays use-case and just be able to input the delay of each stream.
I feel having only two tiles instead of four will not add anything because we still need to draw them at their original aspect ratio and so they won't be able to take more space on the frame.
I also feel that supporting 25 tiles or even 16 is overkill. So maybe focusing on the 4 quadrants with custom delays would be the simplest in terms of user interface for both the user and dev since it can be hardcoded as 4 text boxes.
The underlying code would still be capable of all the other stuff but not necessarily exposed until clear user-cases are defined.
799 2016-11-16 17:54:59
Re: 1 camera, 2 capture screens (2 different delays) (5 replies, posted in Bug reports)
You may use the new feature introduced in 0.8.25 that splits the capture screen in several tiles and display the stream at different delays.
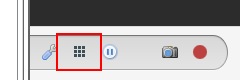
Look for the grid-like icon between the configuration and pause buttons. Select "multiple view" and choose the number of tiles (restricted to perfect squares so that it fits nicely in the original aspect ratio).
At the moment the delay of each sub stream is computed internally so that they spread equally over the memory buffer containing the delayed frames. Does your use-case involve having to manually specify the delay of each stream?
Note that it is purely a "display" feature, if you hit record it is still the original camera stream that will be recorded to disk.
800 2016-11-14 05:56:59
Re: Manual distance calibration (1 replies, posted in Ideas and feature requests)
I can think of two ways to do that:
If you add a line anywhere and do "display measure", it's going to be in pixels. So if you know your scaling factor you could compute the true size of that line and input it manually in the calibration dialog.
The second way is to open and modify the KVA file directly (You have to "save" it at least once first). Look for the node Calibration > CalibrationLine > Scale. This value is the number of real world units per pixel.
801 2016-10-04 17:15:26
Re: Experimental version - 0.8.25 (44 replies, posted in General)
I can repro this, thanks for the report. It was not intended.
802 2016-09-25 20:52:09
Re: Experimental version - 0.8.25 (44 replies, posted in General)
getpa wrote:
having installed the 0.8.25 version x64.exe, i cannot access the PS3eye camera anymore - it is not even appearing in the cam list.
With the win32 version, however, I can still access & work with the cams as previously.
Thanks for the report!
803 2016-09-25 20:49:28
Re: Experimental version - 0.8.25 (44 replies, posted in General)
TriStuff wrote:
As an Android version is unlikely, was wondering whether to buy a cheap Windows Tablet. Will this new version run on the Windows Tablet OS?
If the hardware is running Windows 10 it should work. It will not work on Windows Mobile. Some of the controls and menus might be a bit small for touch interface though.
804 2016-09-24 06:58:07
Re: Exporting Angle Tracking (6 replies, posted in General)
I confirm that 0.8.25 cannot export tracked angles data, only the static angle or individual tracked points from the trajectory tool.
805 2016-09-24 06:35:23
Re: Using 0.8.15 and 0.8.25 side by side (2 replies, posted in General)
You can use the .zip version of 0.8.25. After extraction it will operate from its directory with its own settings and program files. You can even put it on a thumb drive if you want. It's the so-called "portable application" version and doesn't need to be formally installed. Note that it should be extracted to a place where you have write rights though, so not under "C:\Program Files" for example.
In 0.8.15 there was a special export mode where the analysis data was embedded in the video as a subtitle stream. This is no longer supported directly. It should however be possible to reopen the file in 0.8.15 and re-export the analysis in a standalone file (.kva), and then import that file back into 0.8.25. I haven't tried in a while but the newer version should still have a converted to read the old data format.
806 2016-08-24 17:25:53
Topic: Experimental version - 0.8.25 (44 replies, posted in General)
I'm happy to announce the general availability of Kinovea 0.8.25.
This post describes some of the improvements in version 0.8.25 over version 0.8.24.
This release focuses on usability and polishing of existing features, and introduces one new feature in the Capture module.
1. General
Starting with version 0.8.25 a native x64 build is provided. There are now 4 download options. The `zip` files are the portable versions and will run self-contained in the extraction directory. The `exe` files are the installer versions.
The minimum requirements have not changed and Kinovea still runs under all Windows versions between Windows XP and Windows 10.
The interface is now translated to Arabic thanks to Dr. Mansour Attaallah from the Faculty of Physical Education, Alexandria University - Egypt.
2. File explorer
Thumbnails details
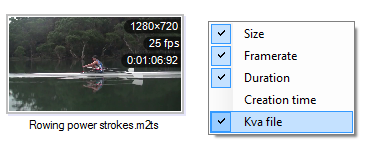
The details overlaid on the thumbnails have been extended and made configurable. The framerate and creation time have been added to the fields that can be displayed, the framerate is displayed by default. Right-click the empty space in the explorer to bring the thumbnails context menu and choose the fields you would like to be shown.
3. Playback module
Interactive navigation cursor
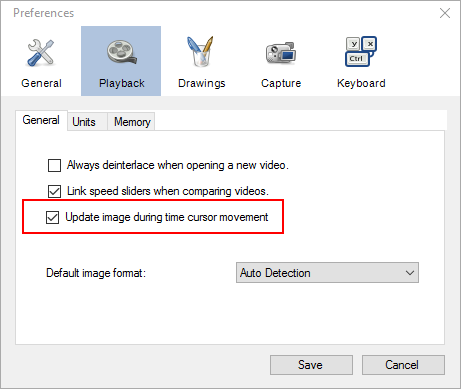
The video now updates immediately when moving the playback cursor. This behavior was previously only activated when the working zone was entirely loaded in memory. It is now enabled by default. The experience should be largely improved but if you are on a less powerful system and navigation is problematic, the behavior of the cursor can be reverted from Preferences > Playback > General > "Update image during time cursor movement".
Video framerate
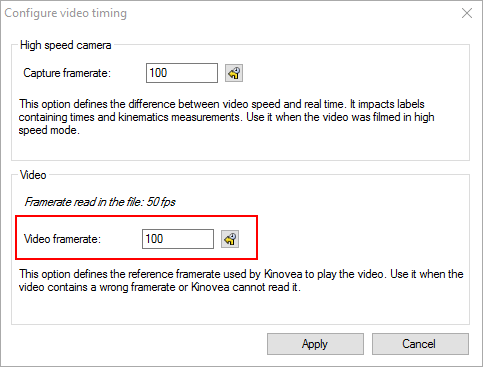
The internal framerate of the video can be customized from the bottom part of the dialog in Video > Configure video timing. This setting changes the "default" framerate of the video by overriding what is written in the file. This is a different concept than slow motion. What the setting does is redefine the nominal speed of the video, the 100%. This is useful when a video has a wrong framerate embedded in it which can happen sometimes. In general use you would not use this setting very often but it can save an odd file. Note that this setting is also not the same as the Capture framerate that can be set from the same configuration box.
4. Annotation tools & measurements
Named objects
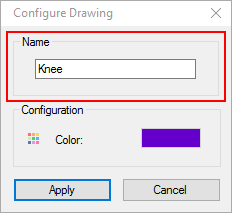
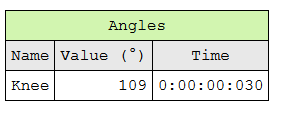
All drawing tool instances (angles, arrows, markers, chronometers, etc.) now have a custom "Name" property. This makes it easier to match drawings with their value when exporting data to spreadsheet. Regarding spreadsheet export, all lines and point markers are now exported to the spreadsheet, whether or not they have the "Display measure" option active in Kinovea.
Custom length unit
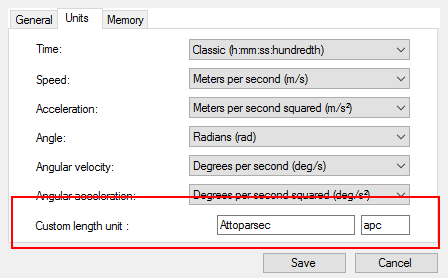
A new custom length unit can be used to cover use-cases that are not natively supported by Kinovea. By default Kinovea natively supports Millimeters, Centimeters, Meters, Inches, Feet and Yards. The extra option can be used to define a new unit such as Micrometers or Kilometers depending on the scale of the video being analyzed, or any unit specific to your field. The default value for this option is "Percentage (%)". The percentage unit would make sense when analyzing dimensions of objects purely relatively to one reference object. The mapping between video pixels and real life dimensions in the custom unit is defined by a calibration line, or a calibration grid for non-orthogonal planes. Any line or grid can be used as the calibration object.
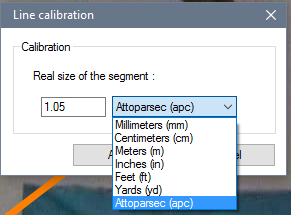
The unit is defined in Preferences > Playback > Units > Custom length unit. It can then be used in any line or grid during calibration.
Default tracking parameters
A default tracking profile can be defined from Preferences > Drawings > Tracking. This profile will be applied by default to newly added tracks and trackable custom tools like the bikefit tool or the goniometer. The parameters can be expressed in percentage of the image size or in actual pixels. Note that in the case of tracks, the tracking profile can also be modified on a per-object basis after addition. This is not currently possible for other objects.
![]()
5. Capture module
File naming automation
The file naming engine has been rewritten from scratch to support a variety of automation scenarios that were not previously well supported. The complete path of captured files is configured from Preferences > Capture > Image naming and Preferences > Capture > video naming.
A complete path is constructed by the concatenation of three top-level values: a root directory, a sub directory and the file name. It is possible to define a different value for these three top-level variables for the left and right screens and for images and videos. The sub directory can stay empty if you do not need this level of customization. Defining root directories on different physical drives for the left and right screens can improve recording performances by parallelizing the writing.
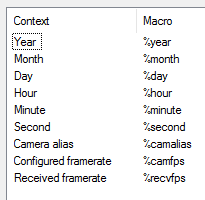
The sub directory and the file name can contain "context variables" that are automatically replaced just in time when saving the file. These variables start with a % sign followed by a keyword. In addition to date and time components you can use the camera alias, the configured framerate and the received framerate in the file name.
The complete list of context variable and the corresponding keyword can be found by clicking the "%" button next to the text boxes.
A few examples:
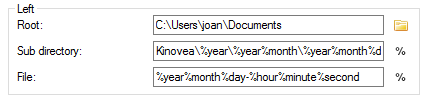
Root: "C:\Users\joan\Documents"
Sub directory: "Kinovea\%year\%year%month\%year%month%day"
File: "%year%month%day-%hour%minute%second"
Result: "C:\Users\joan\Documents\Kinovea\2016\201608\20160815\20160815-141127.jpg" Root: "D:\videos\training\joan"
Sub directory:
File: "squash - %camalias - %camfps"
Result: "D:\videos\training\joan\squash - Back camera - 30.00.mp4"If the file name component does not contain any variable, Kinovea will try to find a number in it and automatically increment it in preparation for the next video so as not to disrupt the flow during multi-attempts recording sessions.
Capture mosaic
The capture mosaic is a new feature introduced in Kinovea 0.8.25. It uses the buffer of images supporting the delay feature as a source of images and display several images from this buffer simultaneously on the screen. The result is a collection of video streams coming from the same camera but slightly shifted in time or running at different framerates. The capture mosaic can be configured by clicking the mosaic button in the capture screen:
Modes:
1. The single view mode corresponds to the usual capture mode: a single video stream is presented, shifted in time by the value of the delay slider.
2. The multiple views mode will split the video stream and present the action shifted in time a bit further for each stream. For example if the delay buffer can contain 100 images (this depends on the image size and the memory options) and the mosaic is configured to show 4 images, then it will show:
the real time image;
a second image from 33 frames ago;
another one from 66 frames ago;
and a fourth one from 100 frames ago.
Each quadrant will continue to update and show its own delayed stream. This can be helpful to get several opportunities to review a fast action.
3. The slow motion mode will split the video stream and present the action in slow motion. Each stream runs at the same speed factor. In order to provide continuous slow motion the streams have to periodically catch up with real time. Having several streams allows you to get continuous slow motion in real time.
4. The time freeze mode will split the video stream and show several still images taken from the buffer. The images are static and the entire collection will synchronize at once, providing a new frozen view of the motion.
6. Feedback
Feel free to use this post for feedback, bug reports, usability issues, feature suggestions, etc.
807 2016-08-24 16:35:58
Re: Working with output time (milliseconds) (2 replies, posted in Bug reports)
If you go to Options > Time you can choose a format for timecodes. Using "Total milliseconds" for example should turn all times into numerical values in the interface and when exporting to spreadsheet. Then you can use them for time arithmetic.
In the data analysis window of tracks the times will always be in milliseconds, disregarding the time format option. So when copying to clipboard and pasting to spreadsheet it should also allow arithmetic.
808 2016-08-23 10:14:57
Topic: Windows 10 Anniversary Update and MJPEG Webcams (0 replies, posted in Bug reports)
So I haven't experienced this issue myself yet, but it has been wildly reported that a recent auto-update of Windows 10 is breaking MJPEG streams for applications based on DirectShow. This impacts for example the Logitech cameras in Kinovea.
There is a long thread over at MS Dev forums and the issue is apparently breaking many high profile applications like Skype.
Basically they wanted to support for multiple applications to consume camera streams so they moved the decoding stage upstream in the pipeline and removed access to the compressed stream.
They are working on a fix which should be pushed through auto-update in September.
809 2016-07-13 18:52:32
Re: Setting Recording Frame Rates for Side-by-Side Videos (1 replies, posted in General)
This is definitely handled differently in 0.8.24.
When using comparison the videos should be both progressing relatively to a common absolute time. There is also an option in the preferences to unlock the speed sliders if that's required. The speed slider percentage is relative to real time (takes capture framerate into account if it has been set).
After the synchronization point has been set between videos, the times before it are indeed expressed as negative.
0.8.25 also has a additional setting to force a different reference playback framerate, in case the video metadata is wrong.
It's also my experience that most "cheaper" sensors will auto-exposure in low light conditions and degrade the framerate to a value of 1/exposure duration.
810 2016-06-27 15:21:09
Re: Basic High Speed Video Camera Considerations & Cameras (51 replies, posted in Cameras and hardware)
Thanks for providing the straight-from-camera files. Here are the links:
- ex100f-1.avi. 240fps, 1/10000, 512×384px. (8.17 MB).
- ex100f-2.avi. 480fps, 1/10000, 224×160px. (7.36 MB).